


轻型可操作机械臂技术新突破
【CPS中安网 cps.com.cn】 当前,世界各国纷纷将突破服务机器人技术、发展服务机器人产业作为本国科技发展的重要战略。随着信息网络、传感器、智能控制、仿生材料等高新技术的发展,以及机电工程与生物医学工程等的交叉融合,服务机器人产业需求更加旺盛。
据统计,目前世界上至少有48个国家在发展机器人产业,其中25个国家的400多家企业已涉足服务机器人领域,技术处于前列的国家主要有美国、法国、德国、日本和韩国等。据了解,全球服务机器人市场上仅有部分国防机器人、家用清洁机器人、农业机器人实现了产业化,而技术含量更高的医疗机器人、康复机器人、可操作类服务机器人等仍然处于研发试验阶段。
特别是服务机器人的机械臂系统仍存在多种技术壁垒。目前可操作仿生机械臂产品主要以大型工业机器人为主,具有大型、重量级、集成工业控制等特点,而轻型机械臂以娱乐、教育为主,不具备操作能力。
为解决IAB产业发展关键技术瓶颈、填补国内空白,广州市政府制定了对外科技合作计划,与多家国(境)外大学、研究机构签订了合作协议框架,并对与之合作开展应用技术、实用技术、试验推广开发技术等实质性合作研发的企事业单位给予大力扶持。
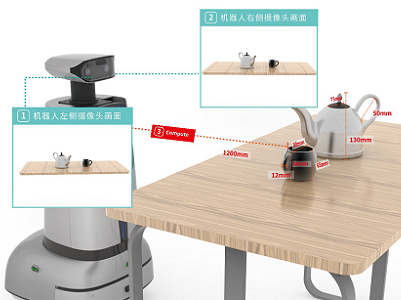
在此背景下,广州弘度信息科技有限公司与中科院、新西兰奥克兰大学合作开展基于3D视觉的智能机器人抓取系统关键技术研究与应用,并取得突破性成果,实现了仿生3D机械臂抓取,填补了国内可操作机械臂的研究和应用空白,达到世界领先水平。
该系统通过3D视觉识别和重建技术,为机械臂抓取算法提供基础数据,采用7关节仿生机械臂结构,实现了机械臂的拟人化,解决了服务机器人的操作能力问题。同时采用最新轻量级电机,实现机械臂的轻型化;采用运动控制模块与算法模块分离设计,实现机械臂的通用化,可根据实际应用需求自动判断位置信息,适用不同的应用场景。

声明:
凡文章来源标注为"CPS中安网"的文章版权均为本站所有,如需转载请务必注明出处为"CPS中安网",违反者本网将追究相关法律责任。非本网作品均来自互联网并标明了来源,如出现侵权行为,请立即与我们联系,待核实后,我们将立即删除,并向您致歉。

征稿:
为了更好的发挥CPS中安网资讯平台价值,促进诸位自身发展以及业务拓展,更好地为企业及个人提供服务,中安网诚征各类稿件,欢迎有实力安防企业、机构、研究员、行业分析师。投稿邮箱: tougao@cps.com.cn(查看征稿详细)










 粤公网安备:44030402001522号
粤公网安备:44030402001522号